Python中文网 - 问答频道, 解决您学习工作中的Python难题和Bug
Python常见问题
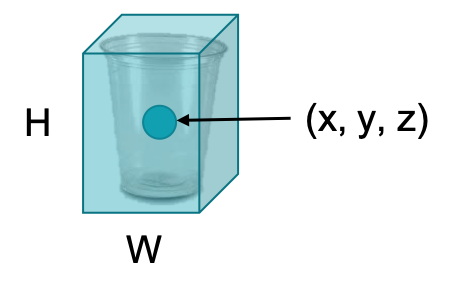
目标。估计中心的三维位置(x,y,z)、玻璃的宽度(较大直径)和高度。类似于this drawing。输入是两个图像,一个来自不同的相机(here和here)
{kind=link}
{kind=link}
{kind=link}
设置。图像来自两个固定和校准(已知的内在和外在参数)相机
我的尝试
- 我用FCN或DeepLab分割了图像。结果here和here
- 然后我得到了一个感兴趣的二元掩码(glass)并提取了该掩码的最左、上、右和底部部分。结果here和here
- 通过对“对应点”的三角剖分,我得到了四个三维点(图像1的上方与图像2的上方、图像1的最右侧与图像2的最右侧等)
- 我将尺寸计算为:宽度=|左-右|,高度=|上-下|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
问题。这些点不是实际的对应,因此重投影是不准确的,然后测量也是不准确的(导致高达3厘米的误差)。请注意,如果我手动选择两幅图像上对应的像素,然后进行三角剖分,我会得到大约0.1厘米的误差
你能指导我如何更好地(更准确地)解决这个问题吗?
谢谢你
PS:我正在使用python和OpenCV
Tags: 图像目标参数宽度高度herethis中心
热门问题
- 为什么我的神经网络模型的准确性不能在这个训练集上得到提高?
- 为什么我的神经网络模型的权重变化不大?
- 为什么我的神经网络的成本不断增加?
- 为什么我的神经网络的输入pickle文件是19GB?
- 为什么我的神经网络给属性错误?“非类型”对象没有属性“形状”
- 为什么我的神经网络训练这么慢?
- 为什么我的神经网络输出错误?
- 为什么我的神经网络预测适用于MNIST手绘图像时是正确的,而适用于我自己的手绘图像时是不正确的?
- 为什么我的神经网络验证精度比我的训练精度高,而且它们都是常数?
- 为什么我的私人用户间聊天会显示在其他用户的聊天档案中?
- 为什么我的积分的绝对误差估计值大于积分(使用scipy.integrate.nqad)?
- 为什么我的积层回归器得分比它的组件差?
- 为什么我的移动方法不起作用?
- 为什么我的稀疏张量不能转换成张量
- 为什么我的稀疏张量不能转换成张量?
- 为什么我的程序“停止”了?
- 为什么我的程序一直试图占用所有可用的CPU
- 为什么我的程序不使用指定的代理
- 为什么我的程序不工作(python帮助中的反向函数)?
- 为什么我的程序不工作时,我使用多处理模块
热门文章
- Python覆盖写入文件
- 怎样创建一个 Python 列表?
- Python3 List append()方法使用
- 派森语言
- Python List pop()方法
- Python Django Web典型模块开发实战
- Python input() 函数
- Python3 列表(list) clear()方法
- Python游戏编程入门
- 如何创建一个空的set?
- python如何定义(创建)一个字符串
- Python标准库 [The Python Standard Library by Ex
- Python网络数据爬取及分析从入门到精通(分析篇)
- Python3 for 循环语句
- Python List insert() 方法
- Python 字典(Dictionary) update()方法
- Python编程无师自通 专业程序员的养成
- Python3 List count()方法
- Python 网络爬虫实战 [Web Crawler With Python]
- Python Cookbook(第2版)中文版
目前没有回答
相关问题 更多 >
编程相关推荐