Python中文网 - 问答频道, 解决您学习工作中的Python难题和Bug
Python常见问题
我试图检测产品的方向,所以我可以用这个方向来选择和放置系统
- 我能探测到物体的轮廓
- 我可以计算出轮廓的中心
- 我可以通过在轮廓上拟合一个椭圆来计算角度,但是结果并不稳定
问题是角度的确定,因为产品在最理想的质量方面也是在上侧和下侧。通过拟合椭圆来计算角度是不稳定的。有时向量指向左边,有时指向右边。如下图所示,您可以在下图(https://answers.opencv.org/upfiles/15684659369233735.png)中看到,所绘制的角度线并不总是指向同一方向
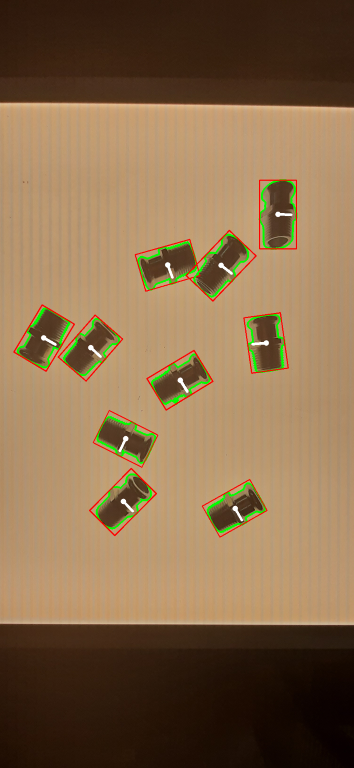{kind=link}
以下是我目前的代码:
import cv2
import numpy as np
import math
# read the image
cap = cv2.imread("20190909_170137.jpg")
def nothing(x):
pass
# create slider
cv2.namedWindow("Trackbars")
hh='Max'
hl='Min'
wnd = 'Colorbars'
cv2.createTrackbar("threshold", "Trackbars", 150, 255, nothing)
cv2.createTrackbar("Houghlines", "Trackbars", 255, 255, nothing)
while True:
frame = cv2.imread("20190909_170137.jpg", cv2.IMREAD_COLOR)
scale_percent = 60 # percent of original size
width = int(frame.shape[1] * scale_percent / 100)
height = int(frame.shape[0] * scale_percent / 100)
dim = (width, height)
# resize image
frame = cv2.resize(frame, dim, interpolation = cv2.INTER_AREA)
# create sliders for variables
l_v = cv2.getTrackbarPos("threshold", "Trackbars")
u_v = cv2.getTrackbarPos("Houghlines", "Trackbars")
#convert frame to Black and White
bw = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
#convert Black and White to binary image
ret,thresh4 = cv2.threshold(bw,l_v,255,cv2.THRESH_BINARY)
#find the contours in thresh4
im2, contours, hierarchy = cv2.findContours(thresh4, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE)
#calculate with contour
for contour in contours:
#calculate area and moment of each contour
area = cv2.contourArea(contour)
M = cv2.moments(contour)
if M["m00"] > 0:
cX = int(M["m10"] / M["m00"])
cY = int(M["m01"] / M["m00"])
#Use contour if size is bigger then 1000 and smaller then 50000
if area > 1000:
if area <50000:
approx = cv2.approxPolyDP(contour, 0.001*cv2.arcLength(contour, True), True)
#draw contour
cv2.drawContours(frame, contour, -1, (0, 255, 0), 3)
#draw circle on center of contour
cv2.circle(frame, (cX, cY), 7, (255, 255, 255), -1)
perimeter = cv2.arcLength(contour,True)
approx = cv2.approxPolyDP(contour, 0.04 * perimeter, True)
#fit elipse
_ ,_ ,angle = cv2.fitEllipse(contour)
P1x = cX
P1y = cY
length = 35
#calculate vector line at angle of bounding box
P2x = int(P1x + length * math.cos(math.radians(angle)))
P2y = int(P1y + length * math.sin(math.radians(angle)))
#draw vector line
cv2.line(frame,(cX, cY),(P2x,P2y),(255,255,255),5)
#output center of contour
print (P1x , P2y, angle)
#detect bounding box
rect = cv2.minAreaRect(contour)
box = cv2.boxPoints(rect)
box = np.int0(box)
#draw bounding box
cv2.drawContours(frame, [box],0,(0,0,255),2)
#Detect Hull
hull = cv2.convexHull(contour)
#draw line
#img_hull = cv2.drawContours(frame,[hull],0,(0,0,255),2)
#print (angle)
# print (p)
cv2.imshow("Frame", thresh4)
key = cv2.waitKey(1)
cv2.imwrite('thresh4.png',thresh4)
key = cv2.waitKey(1)
cv2.imshow("bw2", frame)
key = cv2.waitKey(1)
cv2.imwrite('box.png',frame)
key = cv2.waitKey(1)
key = cv2.waitKey(1)
#if key == 27:
# break
break
#cap.release()
cv2.destroyAllWindows()
有人知道我怎样才能确保角度(方向)的计算是100%正确的吗
您可以在以下链接中找到示例图片:
{kind=link}
Tags: ofkeyboxtrueifmathcv2frame
热门问题
- 带json的Pass生成器(最好在MQTT上)
- 带json的pythonFlask
- 带json的Python传输代码
- 带json的Python读取API
- 带JSON约束的Android POST请求
- 带Jupyter笔记本和Sp的Docker
- 带Jupyter笔记本的IdeaVim
- 带Jupyter笔记本的Matplotlib不会绘制绘图,但会更正轴值
- 带kbhi套接字的Python线程
- 带Keras fit_发生器的记忆错误
- 带keras-给定错误的卷积神经网络,UnboundLocalError:local变量“a”在赋值之前引用
- 带Keras和WGANs的无效argumenterror
- 带Keras的LSTM:Assign Op的Input'ref'需要左值inpu
- 带keras的解密器
- 带KeyError的简单循环:8167
- 带key和valu的Python二叉搜索树
- 带Kivy ConfigPars的布尔函数等
- 带kivy+matplotlib的Android.apk
- 带kivy的可滚动注册屏幕
- 带kivy的圆形/圆形图像
热门文章
- Python覆盖写入文件
- 怎样创建一个 Python 列表?
- Python3 List append()方法使用
- 派森语言
- Python List pop()方法
- Python Django Web典型模块开发实战
- Python input() 函数
- Python3 列表(list) clear()方法
- Python游戏编程入门
- 如何创建一个空的set?
- python如何定义(创建)一个字符串
- Python标准库 [The Python Standard Library by Ex
- Python网络数据爬取及分析从入门到精通(分析篇)
- Python3 for 循环语句
- Python List insert() 方法
- Python 字典(Dictionary) update()方法
- Python编程无师自通 专业程序员的养成
- Python3 List count()方法
- Python 网络爬虫实战 [Web Crawler With Python]
- Python Cookbook(第2版)中文版
目前没有回答
相关问题 更多 >
编程相关推荐